|
| | EVs_AbsoluteIMU (uint8_t i2c_address=0x22) |
| |
| uint8_t | issueCommand (char command) |
| |
| void | readGyro (gyro &currGyro) |
| |
| void | readCompass (cmps &currCompass) |
| |
| void | readAccelerometer (accl &currAccelerometer) |
| |
| void | readMagneticField (magnetic_field &currMagnetic_field) |
| |
| bool | beginCompassCalibration () |
| |
| bool | endCompassCalibration () |
| |
| | EVShieldI2C (uint8_t i2c_address) |
| |
| void | init (void *shield, SH_BankPort bp) |
| |
| uint8_t | readByte (uint8_t location) |
| |
| uint16_t | readInteger (uint8_t location) |
| |
| uint32_t | readLong (uint8_t location) |
| |
| uint8_t * | readRegisters (uint8_t start_register, uint8_t bytes, uint8_t *buf) |
| |
| char * | readString (uint8_t location, uint8_t bytes_to_read, uint8_t *buffer=0, uint8_t buffer_length=0) |
| |
| bool | writeRegisters (uint8_t start_register, uint8_t bytes_to_write, uint8_t *buffer=0) |
| |
| bool | writeByte (uint8_t location, uint8_t data) |
| |
| bool | writeInteger (uint8_t location, uint16_t data) |
| |
| bool | writeLong (uint8_t location, uint32_t data) |
| |
| char * | getFirmwareVersion () |
| |
| char * | getVendorID () |
| |
| char * | getDeviceID () |
| |
| char * | getFeatureSet () |
| |
| uint8_t | getErrorCode () |
| |
|
bool | checkAddress () |
| |
| bool | setAddress (uint8_t address) |
| |
| | BaseI2CDevice (uint8_t i2c_address) |
| |
| void | initProtocol () |
| |
| uint8_t * | readRegisters (uint8_t start_register, uint8_t bytes_to_read, uint8_t *buffer=0, uint8_t buffer_length=0, bool clear_buffer=false) |
| |
| uint8_t | readByte (uint8_t location) |
| |
| int16_t | readInteger (uint8_t location) |
| |
| uint32_t | readLong (uint8_t location) |
| |
| char * | readString (uint8_t location, uint8_t bytes_to_read, uint8_t *buffer=0, uint8_t buffer_length=0) |
| |
| bool | writeRegisters (uint8_t start_register, uint8_t bytes_to_write, uint8_t *buffer=0) |
| |
| bool | writeByte (uint8_t location, uint8_t data) |
| |
| bool | writeInteger (uint8_t location, uint16_t data) |
| |
| bool | writeLong (uint8_t location, uint32_t data) |
| |
| bool | checkAddress () |
| |
| bool | setAddress (uint8_t i2c_address) |
| |
| uint8_t | getAddress () |
| |
| uint8_t | getWriteErrorCode () |
| |
| char * | getFirmwareVersion () |
| |
| char * | getVendorID () |
| |
| char * | getDeviceID () |
| |
| char * | getFeatureSet () |
| |
| uint8_t | start (uint8_t addressRW) |
| |
| void | stop (void) |
| |
| uint8_t | restart (uint8_t addressRW) |
| |
| uint8_t | write (uint8_t b) |
| |
| uint8_t | read (uint8_t last) |
| |
| | SoftI2cMaster (uint8_t devAddr) |
| |
| void | initProtocol (uint8_t sclPin=(uint8_t) NULL, uint8_t sdaPin=(uint8_t) NULL) |
| |
| uint8_t * | readRegisters (uint8_t startRegister, uint8_t bytes, uint8_t *buf=NULL) |
| |
| bool | writeRegistersWithLocation (int bytes, uint8_t *buf) |
| |
| bool | writeRegisters (uint8_t location, uint8_t bytes_to_write, uint8_t *buffer=0) |
| |
| bool | writeByte (uint8_t location, uint8_t data) |
| |
| bool | writeInteger (uint8_t location, uint16_t data) |
| |
| bool | writeLong (uint8_t location, uint32_t data) |
| |
| char * | readString (uint8_t startRegister, uint8_t bytes, uint8_t *buf=NULL, uint8_t len=0) |
| |
| uint8_t | readByte (uint8_t location) |
| |
| int16_t | readInteger (uint8_t location) |
| |
| uint32_t | readLong (uint8_t location) |
| |
| char * | getFirmwareVersion () |
| |
| char * | getVendorID () |
| |
| char * | getDeviceID () |
| |
| uint8_t | getWriteErrorCode () |
| |
| bool | checkAddress () |
| |
| bool | setAddress (uint8_t address) |
| |
This class interfaces with AbsoluteIMU sensor attached to EVShield.
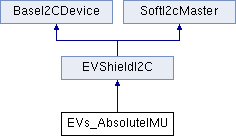
 Public Member Functions inherited from EVShieldI2C
Public Member Functions inherited from EVShieldI2C 1.8.12
1.8.12