|
NXShield
v1.07
NXShield Library Reference by OpenElectrons.com
|
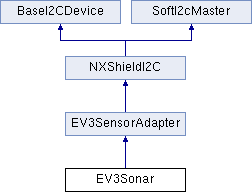
This class implements EV3 Ultrasonic Sensor using EV3SensorAdapter. Note that the distances returned are 10 times the units, i.e. when units are MODE_Sonar_CM, for obstacle at 5 centimeters it will return you 50. More...
#include <EV3Sonar.h>
Public Member Functions | |
| EV3Sonar (uint8_t i2c_address=0x32) | |
| uint8_t | setMode (MODE_Sonar) |
| uint8_t | detect () |
 Public Member Functions inherited from EV3SensorAdapter Public Member Functions inherited from EV3SensorAdapter | |
| EV3SensorAdapter (uint8_t i2c_address=0x32) | |
| uint8_t | issueCommand (char command) |
| uint8_t | setMode (char newMode) |
| byte | getMode () |
| int | readValue () |
| Public Member Functions inherited from NXShieldI2C | |
| NXShieldI2C (uint8_t i2c_address) | |
| void | init (void *shield, SH_BankPort bp) |
| uint8_t | readByte (uint8_t location) |
| uint16_t | readInteger (uint8_t location) |
| uint32_t | readLong (uint8_t location) |
| uint8_t * | readRegisters (uint8_t start_register, uint8_t bytes, uint8_t *buf) |
| char * | readString (uint8_t location, uint8_t bytes_to_read, uint8_t *buffer=0, uint8_t buffer_length=0) |
| bool | writeRegisters (uint8_t start_register, uint8_t bytes_to_write, uint8_t *buffer=0) |
| bool | writeByte (uint8_t location, uint8_t data) |
| bool | writeInteger (uint8_t location, uint16_t data) |
| bool | writeLong (uint8_t location, uint32_t data) |
| char * | getFirmwareVersion () |
| char * | getVendorID () |
| char * | getDeviceID () |
| char * | getFeatureSet () |
| uint8_t | getErrorCode () |
| bool | checkAddress () |
| bool | setAddress (uint8_t address) |
| Public Member Functions inherited from BaseI2CDevice | |
| BaseI2CDevice (uint8_t i2c_address) | |
| void | initProtocol () |
| uint8_t * | readRegisters (uint8_t start_register, uint8_t bytes_to_read, uint8_t *buffer=0, uint8_t buffer_length=0, bool clear_buffer=false) |
| uint8_t | readByte (uint8_t location) |
| int16_t | readInteger (uint8_t location) |
| uint32_t | readLong (uint8_t location) |
| char * | readString (uint8_t location, uint8_t bytes_to_read, uint8_t *buffer=0, uint8_t buffer_length=0) |
| bool | writeRegisters (uint8_t start_register, uint8_t bytes_to_write, uint8_t *buffer=0) |
| bool | writeByte (uint8_t location, uint8_t data) |
| bool | writeInteger (uint8_t location, uint16_t data) |
| bool | writeLong (uint8_t location, uint32_t data) |
| bool | checkAddress () |
| bool | setAddress (uint8_t i2c_address) |
| uint8_t | getAddress () |
| uint8_t | getWriteErrorCode () |
| char * | getFirmwareVersion () |
| char * | getVendorID () |
| char * | getDeviceID () |
| char * | getFeatureSet () |
| Public Member Functions inherited from SoftI2cMaster | |
| uint8_t | start (uint8_t addressRW) |
| void | stop (void) |
| uint8_t | restart (uint8_t addressRW) |
| uint8_t | write (uint8_t b) |
| uint8_t | read (uint8_t last) |
| SoftI2cMaster (uint8_t devAddr) | |
| void | initProtocol (uint8_t sclPin=NULL, uint8_t sdaPin=NULL) |
| uint8_t * | readRegisters (uint8_t startRegister, uint8_t bytes, uint8_t *buf=NULL) |
| bool | writeRegistersWithLocation (int bytes, uint8_t *buf) |
| bool | writeRegisters (uint8_t location, uint8_t bytes_to_write, uint8_t *buffer=0) |
| bool | writeByte (uint8_t location, uint8_t data) |
| bool | writeInteger (uint8_t location, uint16_t data) |
| bool | writeLong (uint8_t location, uint32_t data) |
| char * | readString (uint8_t startRegister, uint8_t bytes, uint8_t *buf=NULL, uint8_t len=0) |
| uint8_t | readByte (uint8_t location) |
| int16_t | readInteger (uint8_t location) |
| uint32_t | readLong (uint8_t location) |
| char * | getFirmwareVersion () |
| char * | getVendorID () |
| char * | getDeviceID () |
| uint8_t | getWriteErrorCode () |
| bool | checkAddress () |
| bool | setAddress (uint8_t address) |
Additional Inherited Members | |
| Public Attributes inherited from NXShieldI2C | |
| void * | mp_shield |
| uint8_t * | _i2c_buffer |
| uint8_t | m_protocol |
| Public Attributes inherited from SoftI2cMaster | |
| uint8_t * | _so_buffer |
| Static Public Attributes inherited from BaseI2CDevice | |
| static uint8_t * | _buffer = 0 |
| static bool | b_initialized = false |
| Protected Member Functions inherited from BaseI2CDevice | |
| void | setWriteErrorCode (uint8_t code) |
This class implements EV3 Ultrasonic Sensor using EV3SensorAdapter. Note that the distances returned are 10 times the units, i.e. when units are MODE_Sonar_CM, for obstacle at 5 centimeters it will return you 50.
| uint8_t EV3Sonar::detect | ( | ) |
Sonar sensor's values will be specific for Proximity in Centimeters, Proximity in Inches, and Presence modes.
| uint8_t EV3Sonar::setMode | ( | MODE_Sonar | m | ) |
Class constructor for EV3Sonar; custom i2c address is an optional parameter
 1.8.5
1.8.5 
