|
NXShield
v1.07
NXShield Library Reference by OpenElectrons.com
|
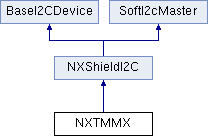
This class interfaces with NXTMMX attached to NXShield. More...
#include <NXTMMX.h>
Public Member Functions | |
| NXTMMX (uint8_t i2c_address=0x06) | |
| uint8_t | getBatteryVoltage () |
| uint8_t | issueCommand (char command) |
| bool | setEncoderTarget (uint8_t which_motor, long target) |
| long | getEncoderTarget (uint8_t which_motor) |
| bool | setSpeed (uint8_t which_motor, int speed) |
| int8_t | getSpeed (uint8_t which_motor) |
| bool | getTimeToRun (uint8_t which_motor, int seconds) |
| uint8_t | getTimeToRun (uint8_t which_motor) |
| bool | setCommandRegB (uint8_t which_motor, uint8_t value) |
| uint8_t | getCommandRegB (uint8_t which_motor) |
| bool | setCommandRegA (uint8_t which_motor, uint8_t value) |
| uint8_t | getCommandRegA (uint8_t which_motor) |
| int32_t | getEncoderPosition (uint8_t which_motor) |
| uint8_t | getMotorStatusByte (uint8_t which_motor) |
| uint8_t | getMotorTasksRunningByte (uint8_t which_motor) |
| bool | setEncoderPID (uint16_t Kp, uint16_t Ki, uint16_t Kd) |
| bool | setSpeedPID (uint16_t Kp, uint16_t Ki, uint16_t Kd) |
| bool | setPassCount (uint8_t pass_count) |
| bool | setTolerance (uint8_t tolerance) |
| bool | reset () |
| bool | startMotorsInSync () |
| bool | resetEncoder (uint8_t which_motor) |
| bool | setSpeedTimeAndControl (uint8_t which_motors, int speed, uint8_t duration, uint8_t control) |
| bool | setEncoderSpeedTimeAndControl (uint8_t which_motors, long encoder, int speed, uint8_t duration, uint8_t control) |
| bool | isTimeDone (uint8_t which_motors) |
| void | waitUntilTimeDone (uint8_t which_motors) |
| bool | isTachoDone (uint8_t which_motors) |
| void | waitUntilTachoDone (uint8_t which_motors) |
| void | runUnlimited (uint8_t which_motors, uint8_t direction, int speed) |
| void | runSeconds (uint8_t which_motors, uint8_t direction, int speed, uint8_t duration, uint8_t wait_for_completion, uint8_t next_action) |
| void | runTachometer (uint8_t which_motors, uint8_t direction, int speed, long tachometer, uint8_t relative, uint8_t wait_for_completion, uint8_t next_action) |
| void | runDegrees (uint8_t which_motors, uint8_t direction, int speed, long degrees, uint8_t wait_for_completion, uint8_t next_action) |
| void | runRotations (uint8_t which_motors, uint8_t direction, int speed, long rotations, uint8_t wait_for_completion, uint8_t next_action) |
| bool | stop (uint8_t which_motors, uint8_t next_action) |
 Public Member Functions inherited from NXShieldI2C Public Member Functions inherited from NXShieldI2C | |
| NXShieldI2C (uint8_t i2c_address) | |
| void | init (void *shield, SH_BankPort bp) |
| uint8_t | readByte (uint8_t location) |
| uint16_t | readInteger (uint8_t location) |
| uint32_t | readLong (uint8_t location) |
| uint8_t * | readRegisters (uint8_t start_register, uint8_t bytes, uint8_t *buf) |
| char * | readString (uint8_t location, uint8_t bytes_to_read, uint8_t *buffer=0, uint8_t buffer_length=0) |
| bool | writeRegisters (uint8_t start_register, uint8_t bytes_to_write, uint8_t *buffer=0) |
| bool | writeByte (uint8_t location, uint8_t data) |
| bool | writeInteger (uint8_t location, uint16_t data) |
| bool | writeLong (uint8_t location, uint32_t data) |
| char * | getFirmwareVersion () |
| char * | getVendorID () |
| char * | getDeviceID () |
| char * | getFeatureSet () |
| uint8_t | getErrorCode () |
| bool | checkAddress () |
| bool | setAddress (uint8_t address) |
| Public Member Functions inherited from BaseI2CDevice | |
| BaseI2CDevice (uint8_t i2c_address) | |
| void | initProtocol () |
| uint8_t * | readRegisters (uint8_t start_register, uint8_t bytes_to_read, uint8_t *buffer=0, uint8_t buffer_length=0, bool clear_buffer=false) |
| uint8_t | readByte (uint8_t location) |
| int16_t | readInteger (uint8_t location) |
| uint32_t | readLong (uint8_t location) |
| char * | readString (uint8_t location, uint8_t bytes_to_read, uint8_t *buffer=0, uint8_t buffer_length=0) |
| bool | writeRegisters (uint8_t start_register, uint8_t bytes_to_write, uint8_t *buffer=0) |
| bool | writeByte (uint8_t location, uint8_t data) |
| bool | writeInteger (uint8_t location, uint16_t data) |
| bool | writeLong (uint8_t location, uint32_t data) |
| bool | checkAddress () |
| bool | setAddress (uint8_t i2c_address) |
| uint8_t | getAddress () |
| uint8_t | getWriteErrorCode () |
| char * | getFirmwareVersion () |
| char * | getVendorID () |
| char * | getDeviceID () |
| char * | getFeatureSet () |
| Public Member Functions inherited from SoftI2cMaster | |
| uint8_t | start (uint8_t addressRW) |
| void | stop (void) |
| uint8_t | restart (uint8_t addressRW) |
| uint8_t | write (uint8_t b) |
| uint8_t | read (uint8_t last) |
| SoftI2cMaster (uint8_t devAddr) | |
| void | initProtocol (uint8_t sclPin=NULL, uint8_t sdaPin=NULL) |
| uint8_t * | readRegisters (uint8_t startRegister, uint8_t bytes, uint8_t *buf=NULL) |
| bool | writeRegistersWithLocation (int bytes, uint8_t *buf) |
| bool | writeRegisters (uint8_t location, uint8_t bytes_to_write, uint8_t *buffer=0) |
| bool | writeByte (uint8_t location, uint8_t data) |
| bool | writeInteger (uint8_t location, uint16_t data) |
| bool | writeLong (uint8_t location, uint32_t data) |
| char * | readString (uint8_t startRegister, uint8_t bytes, uint8_t *buf=NULL, uint8_t len=0) |
| uint8_t | readByte (uint8_t location) |
| int16_t | readInteger (uint8_t location) |
| uint32_t | readLong (uint8_t location) |
| char * | getFirmwareVersion () |
| char * | getVendorID () |
| char * | getDeviceID () |
| uint8_t | getWriteErrorCode () |
| bool | checkAddress () |
| bool | setAddress (uint8_t address) |
Additional Inherited Members | |
| Public Attributes inherited from NXShieldI2C | |
| void * | mp_shield |
| uint8_t * | _i2c_buffer |
| uint8_t | m_protocol |
| Public Attributes inherited from SoftI2cMaster | |
| uint8_t * | _so_buffer |
| Static Public Attributes inherited from BaseI2CDevice | |
| static uint8_t * | _buffer = 0 |
| static bool | b_initialized = false |
| Protected Member Functions inherited from BaseI2CDevice | |
| void | setWriteErrorCode (uint8_t code) |
| NXTMMX::NXTMMX | ( | uint8_t | i2c_address = 0x06 | ) |
constructor for NXTMMX
| uint8_t NXTMMX::getBatteryVoltage | ( | ) |
get the battery voltage for the MMX
| int32_t NXTMMX::getEncoderPosition | ( | uint8_t | which_motor | ) |
get the current encoder position of the motor in degrees
| long NXTMMX::getEncoderTarget | ( | uint8_t | which_motor | ) |
get the target encoder position for the motor
| uint8_t NXTMMX::getMotorStatusByte | ( | uint8_t | which_motor | ) |
get the current status of the motor
| uint8_t NXTMMX::getMotorTasksRunningByte | ( | uint8_t | which_motor | ) |
get the tasks that are running on the specific motor
| int8_t NXTMMX::getSpeed | ( | uint8_t | which_motor | ) |
get the speed of the motor
| bool NXTMMX::getTimeToRun | ( | uint8_t | which_motor, |
| int | seconds | ||
| ) |
set the time in seconds for which the motor should run for
| uint8_t NXTMMX::getTimeToRun | ( | uint8_t | which_motor | ) |
get the time in seconds that the motor is running for
| uint8_t NXTMMX::issueCommand | ( | char | command | ) |
issue a command to this bank of the NXTMMX
| bool NXTMMX::isTachoDone | ( | uint8_t | which_motors | ) |
validate if the motor has reached its set target tachometer position
| bool NXTMMX::isTimeDone | ( | uint8_t | which_motors | ) |
validate if the motor has finished running for the set time duration
| bool NXTMMX::reset | ( | ) |
reset all the set values for the motors
| bool NXTMMX::resetEncoder | ( | uint8_t | which_motor | ) |
reset the current encoder position to zero for the motor
| void NXTMMX::runDegrees | ( | uint8_t | which_motors, |
| uint8_t | direction, | ||
| int | speed, | ||
| long | degrees, | ||
| uint8_t | wait_for_completion, | ||
| uint8_t | next_action | ||
| ) |
run the motor for a set number of degrees and proceed to the next action
| void NXTMMX::runRotations | ( | uint8_t | which_motors, |
| uint8_t | direction, | ||
| int | speed, | ||
| long | rotations, | ||
| uint8_t | wait_for_completion, | ||
| uint8_t | next_action | ||
| ) |
run the motor for a set number of complete rotations and proceed to the next action
| void NXTMMX::runSeconds | ( | uint8_t | which_motors, |
| uint8_t | direction, | ||
| int | speed, | ||
| uint8_t | duration, | ||
| uint8_t | wait_for_completion, | ||
| uint8_t | next_action | ||
| ) |
run the motor for a set duration at a set speed and do the next action
| void NXTMMX::runTachometer | ( | uint8_t | which_motors, |
| uint8_t | direction, | ||
| int | speed, | ||
| long | tachometer, | ||
| uint8_t | relative, | ||
| uint8_t | wait_for_completion, | ||
| uint8_t | next_action | ||
| ) |
run until the tachometer target has been reached and do next action
| void NXTMMX::runUnlimited | ( | uint8_t | which_motors, |
| uint8_t | direction, | ||
| int | speed | ||
| ) |
run the motor endlessly at the desired speed in the desired direction
| bool NXTMMX::setEncoderPID | ( | uint16_t | Kp, |
| uint16_t | Ki, | ||
| uint16_t | Kd | ||
| ) |
set the PID control for the encoders
| bool NXTMMX::setEncoderSpeedTimeAndControl | ( | uint8_t | which_motors, |
| long | encoder, | ||
| int | speed, | ||
| uint8_t | duration, | ||
| uint8_t | control | ||
| ) |
set the ratget encoder position, speed, duration to run, and control for the motor
| bool NXTMMX::setEncoderTarget | ( | uint8_t | which_motor, |
| long | target | ||
| ) |
set the target encoder position for the motor
| bool NXTMMX::setPassCount | ( | uint8_t | pass_count | ) |
set how many times the PID controller is allowed to oscillate about the set point
| bool NXTMMX::setSpeed | ( | uint8_t | which_motor, |
| int | speed | ||
| ) |
set the speed of the motor
| bool NXTMMX::setSpeedPID | ( | uint16_t | Kp, |
| uint16_t | Ki, | ||
| uint16_t | Kd | ||
| ) |
set the PID control for the speed of the motors
| bool NXTMMX::setSpeedTimeAndControl | ( | uint8_t | which_motors, |
| int | speed, | ||
| uint8_t | duration, | ||
| uint8_t | control | ||
| ) |
set the speed, duration to run, and control for the motor
| bool NXTMMX::setTolerance | ( | uint8_t | tolerance | ) |
set how far away from the set point the PID controller is allowed to oscillate (amplitude)
| bool NXTMMX::startMotorsInSync | ( | ) |
start both motors at the same time to follow the set conditions
| bool NXTMMX::stop | ( | uint8_t | which_motors, |
| uint8_t | next_action | ||
| ) |
stop the motor and do an action
| void NXTMMX::waitUntilTachoDone | ( | uint8_t | which_motors | ) |
wait until the motor has reached its set target tachometer position
| void NXTMMX::waitUntilTimeDone | ( | uint8_t | which_motors | ) |
wait until the motor has finished running for its set respective time duration
 1.8.5
1.8.5 
