|
NXShield
v1.07
NXShield Library Reference by OpenElectrons.com
|
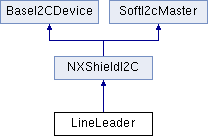
This class interfaces with NXTLineLeader sensor attached to NXShield. More...
#include <LineLeader.h>
Public Member Functions | |
| LineLeader (uint8_t i2c_address=0x02) | |
| uint8_t | issueCommand (char command) |
| bool | calibrateWhite () |
| bool | calibrateBlack () |
| bool | sleep () |
| bool | wakeUp () |
| bool | invertLineColorToWhite () |
| bool | resetColorInversion () |
| bool | takeSnapshot () |
| bool | configureUS () |
| bool | configureEurope () |
| bool | configureUniversal () |
| uint8_t | getSetPoint () |
| bool | setSetPoint (uint8_t spoint) |
| uint8_t | getKp (uint8_t kp) |
| bool | setKp (uint8_t kp) |
| uint8_t | getKi (uint8_t ki) |
| bool | setKi (uint8_t ki) |
| uint8_t | getKd (uint8_t kd) |
| bool | setKd (uint8_t kd) |
| uint8_t | getKpFactor (uint8_t kpfact) |
| bool | setKpFactor (uint8_t kpfact) |
| uint8_t | getKiFactor (uint8_t kifact) |
| bool | setKiFactor (uint8_t kifact) |
| uint8_t | getKdFactor (uint8_t kdfact) |
| bool | setKdFactor (uint8_t kdfact) |
| int | getSteering () |
| unsigned char | getAverage () |
| unsigned char | getResult () |
| uint8_t * | getRawCalibrated () |
| uint8_t * | getRawUncalibrated () |
| uint8_t * | getWhiteLimit () |
| uint8_t * | getBlackLimit () |
| uint8_t * | getWhiteCalibration () |
| uint8_t * | getBlackCalibration () |
 Public Member Functions inherited from NXShieldI2C Public Member Functions inherited from NXShieldI2C | |
| NXShieldI2C (uint8_t i2c_address) | |
| void | init (void *shield, SH_BankPort bp) |
| uint8_t | readByte (uint8_t location) |
| uint16_t | readInteger (uint8_t location) |
| uint32_t | readLong (uint8_t location) |
| uint8_t * | readRegisters (uint8_t start_register, uint8_t bytes, uint8_t *buf) |
| char * | readString (uint8_t location, uint8_t bytes_to_read, uint8_t *buffer=0, uint8_t buffer_length=0) |
| bool | writeRegisters (uint8_t start_register, uint8_t bytes_to_write, uint8_t *buffer=0) |
| bool | writeByte (uint8_t location, uint8_t data) |
| bool | writeInteger (uint8_t location, uint16_t data) |
| bool | writeLong (uint8_t location, uint32_t data) |
| char * | getFirmwareVersion () |
| char * | getVendorID () |
| char * | getDeviceID () |
| char * | getFeatureSet () |
| uint8_t | getErrorCode () |
| bool | checkAddress () |
| bool | setAddress (uint8_t address) |
| Public Member Functions inherited from BaseI2CDevice | |
| BaseI2CDevice (uint8_t i2c_address) | |
| void | initProtocol () |
| uint8_t * | readRegisters (uint8_t start_register, uint8_t bytes_to_read, uint8_t *buffer=0, uint8_t buffer_length=0, bool clear_buffer=false) |
| uint8_t | readByte (uint8_t location) |
| int16_t | readInteger (uint8_t location) |
| uint32_t | readLong (uint8_t location) |
| char * | readString (uint8_t location, uint8_t bytes_to_read, uint8_t *buffer=0, uint8_t buffer_length=0) |
| bool | writeRegisters (uint8_t start_register, uint8_t bytes_to_write, uint8_t *buffer=0) |
| bool | writeByte (uint8_t location, uint8_t data) |
| bool | writeInteger (uint8_t location, uint16_t data) |
| bool | writeLong (uint8_t location, uint32_t data) |
| bool | checkAddress () |
| bool | setAddress (uint8_t i2c_address) |
| uint8_t | getAddress () |
| uint8_t | getWriteErrorCode () |
| char * | getFirmwareVersion () |
| char * | getVendorID () |
| char * | getDeviceID () |
| char * | getFeatureSet () |
| Public Member Functions inherited from SoftI2cMaster | |
| uint8_t | start (uint8_t addressRW) |
| void | stop (void) |
| uint8_t | restart (uint8_t addressRW) |
| uint8_t | write (uint8_t b) |
| uint8_t | read (uint8_t last) |
| SoftI2cMaster (uint8_t devAddr) | |
| void | initProtocol (uint8_t sclPin=NULL, uint8_t sdaPin=NULL) |
| uint8_t * | readRegisters (uint8_t startRegister, uint8_t bytes, uint8_t *buf=NULL) |
| bool | writeRegistersWithLocation (int bytes, uint8_t *buf) |
| bool | writeRegisters (uint8_t location, uint8_t bytes_to_write, uint8_t *buffer=0) |
| bool | writeByte (uint8_t location, uint8_t data) |
| bool | writeInteger (uint8_t location, uint16_t data) |
| bool | writeLong (uint8_t location, uint32_t data) |
| char * | readString (uint8_t startRegister, uint8_t bytes, uint8_t *buf=NULL, uint8_t len=0) |
| uint8_t | readByte (uint8_t location) |
| int16_t | readInteger (uint8_t location) |
| uint32_t | readLong (uint8_t location) |
| char * | getFirmwareVersion () |
| char * | getVendorID () |
| char * | getDeviceID () |
| uint8_t | getWriteErrorCode () |
| bool | checkAddress () |
| bool | setAddress (uint8_t address) |
Additional Inherited Members | |
| Public Attributes inherited from NXShieldI2C | |
| void * | mp_shield |
| uint8_t * | _i2c_buffer |
| uint8_t | m_protocol |
| Public Attributes inherited from SoftI2cMaster | |
| uint8_t * | _so_buffer |
| Static Public Attributes inherited from BaseI2CDevice | |
| static uint8_t * | _buffer = 0 |
| static bool | b_initialized = false |
| Protected Member Functions inherited from BaseI2CDevice | |
| void | setWriteErrorCode (uint8_t code) |
This class interfaces with NXTLineLeader sensor attached to NXShield.
| LineLeader::LineLeader | ( | uint8_t | i2c_address = 0x02 | ) |
class constructor for LineLeader; custom i2c address is an optional parameter
| bool LineLeader::calibrateBlack | ( | ) |
calibrate the current input to the device as black
| bool LineLeader::calibrateWhite | ( | ) |
calibrate the current input to the device as white
| bool LineLeader::configureEurope | ( | ) |
Configure sensor for European region (and regions with 50 Hz electrical frequency)
| bool LineLeader::configureUniversal | ( | ) |
Configure sensor for universal frequency (in this mode the sensor adjusts for any frequency, this is also the default mode).
| bool LineLeader::configureUS | ( | ) |
Configure Sensor for US region (and regions with 60 Hz electrical frequency).
| unsigned char LineLeader::getAverage | ( | ) |
returns a weighted average of the current position of the line in relation to the sensor
| uint8_t * LineLeader::getBlackCalibration | ( | ) |
returns the current calibration of black
| uint8_t * LineLeader::getBlackLimit | ( | ) |
get the limit at which black changes to white
| uint8_t LineLeader::getKd | ( | uint8_t | kd | ) |
get the current derivative factor for PID control
| uint8_t LineLeader::getKdFactor | ( | uint8_t | kdfact | ) |
Get the Kd factor
| uint8_t LineLeader::getKi | ( | uint8_t | ki | ) |
get the current integral factor for PID control
| uint8_t LineLeader::getKiFactor | ( | uint8_t | kifact | ) |
Get the Ki factor
| uint8_t LineLeader::getKp | ( | uint8_t | kp | ) |
get the current proportion factor for PID control
| uint8_t LineLeader::getKpFactor | ( | uint8_t | kpfact | ) |
Get the Kp factor
| uint8_t * LineLeader::getRawCalibrated | ( | ) |
get the raw readings from the sensor that is calibrated based on black and white calibration values
| uint8_t * LineLeader::getRawUncalibrated | ( | ) |
get the raw uncalibrated sensor values straight from the sensor
| unsigned char LineLeader::getResult | ( | ) |
returns a byte of the current result; each bit corresponds to one light sensor
| uint8_t LineLeader::getSetPoint | ( | ) |
returns the current setpoint used by the PID control on the device
| int LineLeader::getSteering | ( | ) |
current steering value, add or subtract from the speed of motors on each side
| uint8_t * LineLeader::getWhiteCalibration | ( | ) |
returns the current calibration of white
| uint8_t * LineLeader::getWhiteLimit | ( | ) |
get the limit at which white changes to black
| bool LineLeader::invertLineColorToWhite | ( | ) |
Color inversion (White line on a black background)
| uint8_t LineLeader::issueCommand | ( | char | command | ) |
write a command byte to the command register of the device
| bool LineLeader::resetColorInversion | ( | ) |
Reset Color inversion (black line on a white background, this is also the default).
| bool LineLeader::setKd | ( | uint8_t | kd | ) |
set the derivative factor for PID control
| bool LineLeader::setKdFactor | ( | uint8_t | kdfact | ) |
Set the Kd factor
| bool LineLeader::setKi | ( | uint8_t | ki | ) |
set the integral factor for PID control
| bool LineLeader::setKiFactor | ( | uint8_t | kifact | ) |
Set the Ki factor
| bool LineLeader::setKp | ( | uint8_t | kp | ) |
set the proportion factor for PID control
| bool LineLeader::setKpFactor | ( | uint8_t | kpfact | ) |
Set the Kp factor
| bool LineLeader::setSetPoint | ( | uint8_t | spoint | ) |
set the desired point relative to the 8 sensors for PID control
| bool LineLeader::sleep | ( | ) |
turn off the LEDs on the device and put it in the sleep state
| bool LineLeader::takeSnapshot | ( | ) |
Take a snapshot, this command looks at the line under the sensor and stores the width and position of the line in sensor’s memory. Subsequently, sensor will use these characteristics of line to track it. This command inverts the colors if it sees a white line on black background. (PID parameters are not affected).
| bool LineLeader::wakeUp | ( | ) |
turn on the LEDs and wake up the device
 1.8.5
1.8.5 
