CHEAT SHEET For CANLight - LED STRIP Controller Kit for FRC Robots
If you are new to CANLight, please refer to this page for related information, and save this URL for future reference.
Required Software Libraries (for Java & C++)
Download here (for 2018): http://mindsensors.com/largefiles/FIRST/mindsensors2018.zip
Installation of this library:
- Locate 'wpilib' folder on your computer (this is generally here: C:/Users/username/wpilib)
('username' is folder for the user that is logged in.) - Open folder 'wpilib/user',
- Unzip the downloaded zip file,
- This zip has 'user' folder, copy contents of 'user' folder to your wpilib/user folder.
(if there is a conflict with existing files, replace them with newly downloaded files).
How to use with LabVIEW
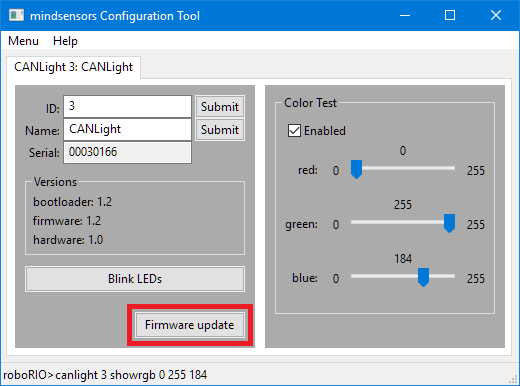
mindsensors Configuration Tool
Download here (for 2018): http://www.mindsensors.com/largefiles/FIRST/mindsensorsConfigurationTool.zip
This software can be used to change the ID, name, limit switch settings, invertedness, and stop behavior of an SD540C. It can also be used to update the device's firmware. Read the blog post for details on how to use it.
Key Features
- Control Standard LED Strips
- Input Voltage: 12V DC
- Input Signal: CAN
- Output: R, G, B Voltage for your LED Strip
- Load capacity: 2 amps sustained, 4 amps peak
- Program from roboRIO
- Using LabVIEW, Java, C++
Power Consumption
CANLight itself doesn't take much power to operate, but the LED strip takes 12 volts, the amperage will vary based on the length of your strip.
As a general guideline for most commonly used LED strips, 4 amps are required for every 5 meters, but be sure to refer to the specs of your strip.
CANLight is designed with built in fuse to prevent overload. If you are using the full length of 5 meters of LED strip on your robot, do not light up the LEDs for extended period of time, doing so may cause overload on the device and your battery (and the fuse will be activated).
What is CAN?
CANLight uses CAN protocol to communicate with the roboRIO.
Note: CAN requires a 120 ohm terminating resistor to ensure signal integrity, especially over distances.
See the blog post for detailed information on CAN and network topologies.