|
EVShield
v1.3
EVShield Library Reference by mindsensors.com
|
|
EVShield
v1.3
EVShield Library Reference by mindsensors.com
|
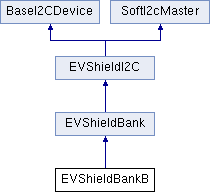
EVShield has two banks. Bank B has few differences from Bank A. This class defines overriding methods for the EVShield Bank B. More...
#include <EVShield.h>
Public Member Functions | |
| EVShieldBankB (uint8_t i2c_address_b=SH_Bank_B) | |
| int | sensorReadRaw (uint8_t which_sensor) |
| bool | sensorSetType (uint8_t which_sensor, uint8_t sensor_type) |
 Public Member Functions inherited from EVShieldBank Public Member Functions inherited from EVShieldBank | |
| EVShieldBank (uint8_t i2c_address=SH_Bank_A) | |
| int | evshieldGetBatteryVoltage () |
| int | nxshieldGetBatteryVoltage () |
| uint8_t | EVShieldIssueCommand (char command) |
| bool | motorSetEncoderTarget (SH_Motor which_motor, long target) |
| long | motorGetEncoderTarget (SH_Motor which_motor) |
| bool | motorSetSpeed (SH_Motor which_motor, int speed) |
| int8_t | motorGetSpeed (SH_Motor which_motor) |
| bool | motorSetTimeToRun (SH_Motor which_motor, int seconds) |
| uint8_t | motorGetTimeToRun (SH_Motor which_motor) |
| bool | motorSetCommandRegB (SH_Motor which_motor, uint8_t value) |
| uint8_t | motorGetCommandRegB (SH_Motor which_motor) |
| bool | motorSetCommandRegA (SH_Motor which_motor, uint8_t value) |
| uint8_t | motorGetCommandRegA (SH_Motor which_motor) |
| int32_t | motorGetEncoderPosition (SH_Motor which_motor) |
| uint8_t | motorGetStatusByte (SH_Motor which_motor) |
| uint8_t | motorGetTasksRunningByte (SH_Motor which_motor) |
| bool | motorSetEncoderPID (uint16_t Kp, uint16_t Ki, uint16_t Kd) |
| bool | motorSetSpeedPID (uint16_t Kp, uint16_t Ki, uint16_t Kd) |
| bool | centerLedSetRGB (uint8_t R, uint8_t G, uint8_t B) |
| bool | ledSetRGB (uint8_t R, uint8_t G, uint8_t B) |
| bool | motorSetPassCount (uint8_t pass_count) |
| bool | motorSetTolerance (uint8_t tolerance) |
| bool | motorReset () |
| bool | motorStartBothInSync () |
| bool | motorResetEncoder (SH_Motor which_motor) |
| bool | motorSetSpeedTimeAndControl (SH_Motor which_motors, int speed, uint8_t duration, uint8_t control) |
| bool | motorSetEncoderSpeedTimeAndControl (SH_Motor which_motors, long encoder, int speed, uint8_t duration, uint8_t control) |
| uint8_t | motorIsTimeDone (SH_Motor which_motors) |
| uint8_t | motorWaitUntilTimeDone (SH_Motor which_motors) |
| uint8_t | motorIsTachoDone (SH_Motor which_motors) |
| uint8_t | motorWaitUntilTachoDone (SH_Motor which_motors) |
| void | motorRunUnlimited (SH_Motor which_motors, SH_Direction direction, int speed) |
| uint8_t | motorRunSeconds (SH_Motor which_motors, SH_Direction direction, int speed, uint8_t duration, SH_Completion_Wait wait_for_completion, SH_Next_Action next_action) |
| uint8_t | motorRunTachometer (SH_Motor which_motors, SH_Direction direction, int speed, long tachometer, SH_Move relative, SH_Completion_Wait wait_for_completion, SH_Next_Action next_action) |
| uint8_t | motorRunDegrees (SH_Motor which_motors, SH_Direction direction, int speed, long degrees, SH_Completion_Wait wait_for_completion, SH_Next_Action next_action) |
| uint8_t | motorRunRotations (SH_Motor which_motors, SH_Direction direction, int speed, long rotations, SH_Completion_Wait wait_for_completion, SH_Next_Action next_action) |
| bool | motorStop (SH_Motor which_motors, SH_Next_Action next_action) |
| bool | sensorSetType (uint8_t which_sensor, uint8_t sensor_type) |
| int | sensorReadRaw (uint8_t which_sensor) |
| Public Member Functions inherited from EVShieldI2C | |
| EVShieldI2C (uint8_t i2c_address) | |
| void | init (void *shield, SH_BankPort bp) |
| uint8_t | readByte (uint8_t location) |
| uint16_t | readInteger (uint8_t location) |
| uint32_t | readLong (uint8_t location) |
| uint8_t * | readRegisters (uint8_t start_register, uint8_t bytes, uint8_t *buf) |
| char * | readString (uint8_t location, uint8_t bytes_to_read, uint8_t *buffer=0, uint8_t buffer_length=0) |
| bool | writeRegisters (uint8_t start_register, uint8_t bytes_to_write, uint8_t *buffer=0) |
| bool | writeByte (uint8_t location, uint8_t data) |
| bool | writeInteger (uint8_t location, uint16_t data) |
| bool | writeLong (uint8_t location, uint32_t data) |
| char * | getFirmwareVersion () |
| char * | getVendorID () |
| char * | getDeviceID () |
| char * | getFeatureSet () |
| uint8_t | getErrorCode () |
| bool | checkAddress () |
| bool | setAddress (uint8_t address) |
| Public Member Functions inherited from BaseI2CDevice | |
| BaseI2CDevice (uint8_t i2c_address) | |
| void | initProtocol () |
| uint8_t * | readRegisters (uint8_t start_register, uint8_t bytes_to_read, uint8_t *buffer=0, uint8_t buffer_length=0, bool clear_buffer=false) |
| uint8_t | readByte (uint8_t location) |
| int16_t | readInteger (uint8_t location) |
| uint32_t | readLong (uint8_t location) |
| char * | readString (uint8_t location, uint8_t bytes_to_read, uint8_t *buffer=0, uint8_t buffer_length=0) |
| bool | writeRegisters (uint8_t start_register, uint8_t bytes_to_write, uint8_t *buffer=0) |
| bool | writeByte (uint8_t location, uint8_t data) |
| bool | writeInteger (uint8_t location, uint16_t data) |
| bool | writeLong (uint8_t location, uint32_t data) |
| bool | checkAddress () |
| bool | setAddress (uint8_t i2c_address) |
| uint8_t | getAddress () |
| uint8_t | getWriteErrorCode () |
| char * | getFirmwareVersion () |
| char * | getVendorID () |
| char * | getDeviceID () |
| char * | getFeatureSet () |
| Public Member Functions inherited from SoftI2cMaster | |
| uint8_t | start (uint8_t addressRW) |
| void | stop (void) |
| uint8_t | restart (uint8_t addressRW) |
| uint8_t | write (uint8_t b) |
| uint8_t | read (uint8_t last) |
| SoftI2cMaster (uint8_t devAddr) | |
| void | initProtocol (uint8_t sclPin=(uint8_t) NULL, uint8_t sdaPin=(uint8_t) NULL) |
| uint8_t * | readRegisters (uint8_t startRegister, uint8_t bytes, uint8_t *buf=NULL) |
| bool | writeRegistersWithLocation (int bytes, uint8_t *buf) |
| bool | writeRegisters (uint8_t location, uint8_t bytes_to_write, uint8_t *buffer=0) |
| bool | writeByte (uint8_t location, uint8_t data) |
| bool | writeInteger (uint8_t location, uint16_t data) |
| bool | writeLong (uint8_t location, uint32_t data) |
| char * | readString (uint8_t startRegister, uint8_t bytes, uint8_t *buf=NULL, uint8_t len=0) |
| uint8_t | readByte (uint8_t location) |
| int16_t | readInteger (uint8_t location) |
| uint32_t | readLong (uint8_t location) |
| char * | getFirmwareVersion () |
| char * | getVendorID () |
| char * | getDeviceID () |
| uint8_t | getWriteErrorCode () |
| bool | checkAddress () |
| bool | setAddress (uint8_t address) |
Additional Inherited Members | |
| Public Attributes inherited from EVShieldI2C | |
| void * | mp_shield |
| uint8_t * | _i2c_buffer |
| uint8_t | m_protocol |
| Public Attributes inherited from SoftI2cMaster | |
| uint8_t * | _so_buffer |
| Static Public Attributes inherited from BaseI2CDevice | |
| static uint8_t * | _buffer = 0 |
| static bool | b_initialized = false |
| Protected Member Functions inherited from BaseI2CDevice | |
| void | setWriteErrorCode (uint8_t code) |
EVShield has two banks. Bank B has few differences from Bank A. This class defines overriding methods for the EVShield Bank B.
| EVShieldBankB::EVShieldBankB | ( | uint8_t | i2c_address_b = SH_Bank_B | ) |
constructor for bank be of the EVShield; optional custom i2c address can be supplied
| int EVShieldBankB::sensorReadRaw | ( | uint8_t | which_sensor | ) |
Read the raw analog value from the sensor and return as an int
| which_sensor | the sensor to read the raw value from |
| bool EVShieldBankB::sensorSetType | ( | uint8_t | which_sensor, |
| uint8_t | sensor_type | ||
| ) |
Set the sensor Type of the sensor on this bank
| which_sensor | the sensor to set the type to. |
| sensor_type | type value of the sensor, refer to Advanced User Guide for available values of sensor types. |
 1.8.12
1.8.12