

Make Your Own Obstacle Avoidance Robot with SumoEyes
4630
Tri-Bot
Instructions can be found at http://www.vmg.vil.ee/Robootika/Lego9695/9695_Tribot100.pdf
- Build Tri-bot
- Remove Lego touch sensor and claws
- Instructions can be found here.
Parts
All part names correspond to those found at http://brickset.com/inventories/8547-1
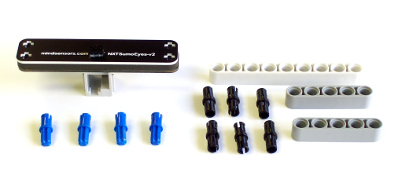
- 1 - NXTSumoEyes
- 1 - technic 9M beam
- 2 - technic 5M beam
- 4 - connector bushing w. friction/crossaxle
- 6 - connector peg w. friction
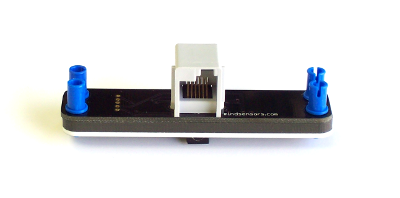
Step 1

- Insert 1 connector peg w. friction into one end of each technic 5M beam.
Step 2

- Raise the technic 9M beam (already on bot) slightly on each side.
- Insert the exposed connector peg w. friction into each end of the technic 9M beam from the bottom.
- Press firmly on all connections to ensure a tight fit.
Step 3

- Insert remaining connector pegs w. friction into holes just in front of the technic 9M beam.
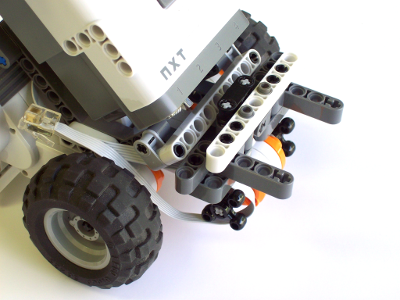
Step 4
- Place technic 9M beam onto the exposed ends of the connector pegs w. friction.
- Keeps NXTSumoEyes stable.
Step 5
- Insert connector bushing w. friction/crossaxle into each cross hole of the NXTSumoEyes.
Step 6
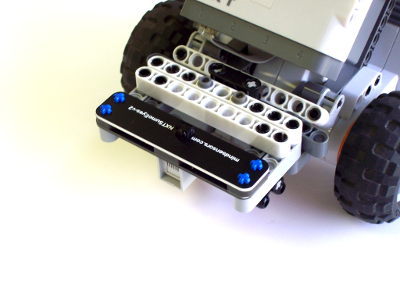
- Insert the exposed end of the connector bushings w. friction/crossaxle into the top side holes on the very front of the robot.
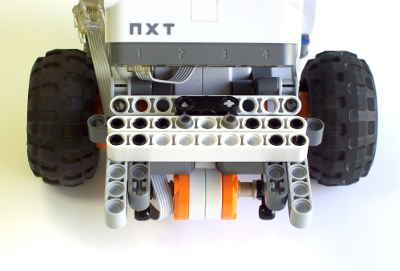
Connections
- Connect NXTSumoEyes to sensor port 1 of the NXT brick using NXT cable.
- Make sure right motor is connected to port B, and left motor is connected to port C.
Programming
Download program here.
No LEGO sensors are used with the program and are not required for bot function.
- Make sure NXTSumoEyes block is downloaded and imported into your programming environment.
- Open Obstacle_Avoidance.ev3 in the EV3 programming environment and download it to the NXT.
Running Tri-Bot
- Start robot and let it run.
- If robot is turning too much or too little you can easily change motor degrees parameters in the program.
Comments (0)
No comments at this moment
Please Login to add your comments

