Keeping plants healthy isn’t just about giving them water — it’s about giving them the right amount at the right...
Latest posts
-
 How to Measure Soil Moisture and Use It in Automatic Plant Watering Systemsread more
How to Measure Soil Moisture and Use It in Automatic Plant Watering Systemsread more -
 USB Driver installation instructions for NXTCam-v5read more
USB Driver installation instructions for NXTCam-v5read moreUSB Driver installation instructions for NXTCam-v5
-
 How to attach rechargeable battery to PiStormsread more
How to attach rechargeable battery to PiStormsread moreHow to attach rechargeable battery to PiStorms
-
 Connect to Wi-Fi Directly from PiStorms!read more
Connect to Wi-Fi Directly from PiStorms!read moreConnect your Raspberry Pi to a Wi-Fi network directly from PiStorms!
-
 Image Recognition Robot with PiStorms and Pi Cameraread more
Image Recognition Robot with PiStorms and Pi Cameraread moreImage Recognition Robot with PiStorms and Pi Camera
-

-
 Rotary Inverted Pendulum with PF-XL Motor and GlideWheel-Mread more
Rotary Inverted Pendulum with PF-XL Motor and GlideWheel-Mread moreRotary Inverted Pendulum with PF-XL Motor and GlideWheel-M
-

-
 Make Your Own Obstacle Avoidance Robot with SumoEyesread more
Make Your Own Obstacle Avoidance Robot with SumoEyesread moreMake Your Own Obstacle Avoidance Robot with SumoEyes
-

Blog categories
Search in blog

Motors: EV3 vs NXT
The large motors for the NXT and EV3 are very similar in design and functionality. However, there are some differences.
Software Differences
There is no difference in the programming of these motors. The EV3-G and NXT-G environments require the use of the same block. Also, all of the third party libraries for use with different platforms and adapters use the same programming method for both the motors.
Physical Differences
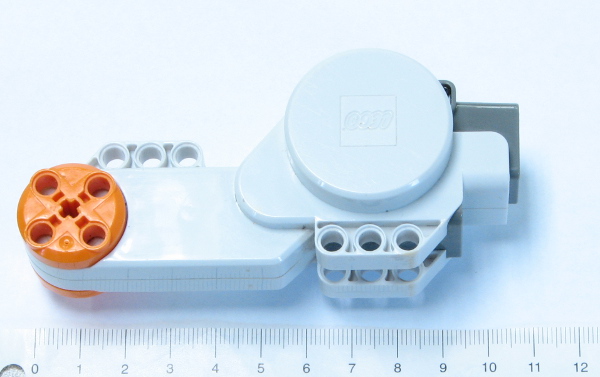
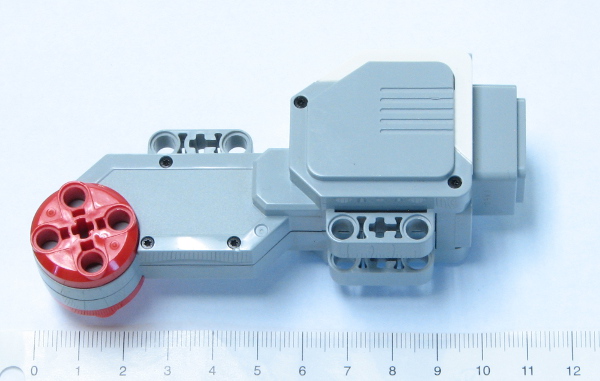
At first glance it is easy to see the differences in design, as each motor complements its corresponding brick. The NXT motor has rounded corners and an orange wheel. The EV3 motor has a more futuristic look with sharp corner a bright red wheel.
The two motors are roughly the same size, giving the illusion that these motors are interchangeable. At closer examination, it is obvious that these two wheel require different mounting procedures. The NXT motor has all rounded holes, whereas the EV3 motor connections have rounded as well as cross axle holes. The EV3 motor also has an extra row of three holes near the electrical port, making the EV3 motor slightly more versatile. Also, the holes are in different places in relation to the wheel. The holes of the EV3 motor sit much lower and some are even shifted to one side.
Functional Differences
These two motors run at similar speeds when used with the EV3. When used with adapter or shield for other platforms (PiStorms, EVShield), the experience is much different. The EV3 motor runs at a noticeably higher speed than the NXT motor. I am only speculating, but I believe the similar speeds on the EV3 are linked to the EV3 brick and encoder feedback.
The large NXT and EV3 motors have somewhat similar rpm and current draw. Detailed information can be found at http://www.philohome.com/motors/motorcomp.htm
Summary
Both motors will work great in any project that requires LEGO motors. However, I recommend using the same type of motor for your drive train or anywhere that requires motors to run in sync. For example, if your right foot stride is twice as long as your left foot stride, then you will always be walking toward the left. Be sure to pick your motors carefully for the task at hand. If you do not have enough of one type of motor or notice that motors are running at different speeds, then you can use the software to sync your motors by tuning the speeds in your program. After all, you want your designs to run circles around other robots not just run in circles (unless of course you program it that way).
Related posts
-
 Line Following Robot with LightSensorArray or LineLeader
Line Following Robot with LightSensorArray or LineLeaderread more
Line Following Robot with LightSensorArray or LineLeader
Line Following Robot with LightSensorArray or LineLeaderread more -
 Attach Mulitple Sensors to a Single EV3 Port
EV3 Sensor Adapter with SPLIT-Nxread more
Attach Mulitple Sensors to a Single EV3 Port
EV3 Sensor Adapter with SPLIT-Nxread more -
 Line Tracking Experiments with NXTCam
Line Tracking Experiments with NXTCamread more
Line Tracking Experiments with NXTCam
Line Tracking Experiments with NXTCamread more -
 Vision for your PiStorms Robot using Pi Camera!
Vision for your PiStorms Robot using Pi Camera!read more
Vision for your PiStorms Robot using Pi Camera!
Vision for your PiStorms Robot using Pi Camera!read more -
 How to install OpenCV on Raspberry Pi and do Face Tracking
How to install OpenCV on Raspberry Pi and do Face Trackingread more
How to install OpenCV on Raspberry Pi and do Face Tracking
How to install OpenCV on Raspberry Pi and do Face Trackingread more
Leave a comment