Keeping plants healthy isn’t just about giving them water — it’s about giving them the right amount at the right...
Latest posts
-
 How to Measure Soil Moisture and Use It in Automatic Plant Watering Systemsread more
How to Measure Soil Moisture and Use It in Automatic Plant Watering Systemsread more -
 USB Driver installation instructions for NXTCam-v5read more
USB Driver installation instructions for NXTCam-v5read moreUSB Driver installation instructions for NXTCam-v5
-
 How to attach rechargeable battery to PiStormsread more
How to attach rechargeable battery to PiStormsread moreHow to attach rechargeable battery to PiStorms
-
 Connect to Wi-Fi Directly from PiStorms!read more
Connect to Wi-Fi Directly from PiStorms!read moreConnect your Raspberry Pi to a Wi-Fi network directly from PiStorms!
-
 Image Recognition Robot with PiStorms and Pi Cameraread more
Image Recognition Robot with PiStorms and Pi Cameraread moreImage Recognition Robot with PiStorms and Pi Camera
-

-
 Rotary Inverted Pendulum with PF-XL Motor and GlideWheel-Mread more
Rotary Inverted Pendulum with PF-XL Motor and GlideWheel-Mread moreRotary Inverted Pendulum with PF-XL Motor and GlideWheel-M
-

-
 Make Your Own Obstacle Avoidance Robot with SumoEyesread more
Make Your Own Obstacle Avoidance Robot with SumoEyesread moreMake Your Own Obstacle Avoidance Robot with SumoEyes
-

Blog categories
Search in blog

Wireless Controlled LEGO Robot with PSP-Nx
Tri-Bot
Instructions can be found at http://www.vmg.vil.ee/Robootika/Lego9695/9695_Tribot100.pdf
- Build Tri-bot
Parts
All part names correspond to those found at http://brickset.com/inventories/8547-1
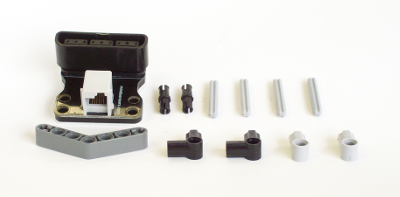
- 1 - PSP-Nx-v4
- 2 - connector pegs w. friction
- 4 - cross axle 3M
- 1 - technic angular beam 4X4
- 2 - angle element, 90 degrees
- 2 - angle element, 0 degrees
Step 1

- Insert a cross axle 3M into each end of the technic angular beam 4X4.
Step 2

- Connect an angle element, 0 degrees onto each end of one of the cross axle 3M.
Step 3

- Connect an angle element, 90 degrees to each end of the other cross axle 3M so that the unconnected end is away form the inside of the technic angular beam 4X4.
Step 4

- Insert a connector peg w. friction into each angle element, 0 degrees so that the unconnected end is towards the inside of the technic angular beam 4X4.
Step 5

- Insert a cross axle 3M into each angle element, 90 degrees.
Step 6

- Insert the unconnected end of each cross axle 3M into the top axle holes of the PSP-Nx-v4.
Step 7


- Remove LEGO sound sensor before mounting PSP-Nx-v4
- Insert the unconnected end of each connector peg w. friction into the center holes of the top back of the NXT brick.
Connections
- Connect PSP-Nx-v4 to sensor port 1 of the NXT brick using NXT cable.
- Make sure middle motor is connected to port A, right motor is connected to port B, and left motor is connected to port C.
Programming
Download EV3 environment program here.
Download NXT-G program here.
No LEGO sensors are used with either program and are not required for bot function.
- Make sure PSP-Nx block is downloaded and imported into your programming environment.
- Open PSP-Nx-v4Tribot.rbt with NXT-G and download it to the NXT.
- Or open PSP-Nx-v4Tribot.ev3 in the EV3 programming environment and download it to the NXT.
Running Tri-Bot
- Connect PS2 dongle.
- Power on the PS2 controller.
- Sync the controller to the dongle.
- If analog light is not lit on the PS2 controller, press the analog button.
- Run the PSP-Nx-v4Tribot program on the NXT.
Video of PSP-Nx Tribot in action:
Related posts
-
 Line Following Robot with LightSensorArray or LineLeader
Line Following Robot with LightSensorArray or LineLeaderread more
Line Following Robot with LightSensorArray or LineLeader
Line Following Robot with LightSensorArray or LineLeaderread more -
 Attach Mulitple Sensors to a Single EV3 Port
EV3 Sensor Adapter with SPLIT-Nxread more
Attach Mulitple Sensors to a Single EV3 Port
EV3 Sensor Adapter with SPLIT-Nxread more -
 Line Tracking Experiments with NXTCam
Line Tracking Experiments with NXTCamread more
Line Tracking Experiments with NXTCam
Line Tracking Experiments with NXTCamread more -
 Vision for your PiStorms Robot using Pi Camera!
Vision for your PiStorms Robot using Pi Camera!read more
Vision for your PiStorms Robot using Pi Camera!
Vision for your PiStorms Robot using Pi Camera!read more -
 How to install OpenCV on Raspberry Pi and do Face Tracking
How to install OpenCV on Raspberry Pi and do Face Trackingread more
How to install OpenCV on Raspberry Pi and do Face Tracking
How to install OpenCV on Raspberry Pi and do Face Trackingread more
Leave a comment